- 产品分类
移动测量扫描
当前位置:首页 >> 产品中心 >> 三维激光扫描/移动测量 >> 移动测量扫描
SZT-R1000车机载一体化轻型移动测量系统
发布时间:2017-04-25 13:40:22 浏览量:4305次
SZT-R1000车机载一体化轻型移动测量系统
产品简介:
SZT-R1000车机载一体化轻型移动测量系统是我们自主研发的轻型移动测量系统,将高精度三维激光扫描仪、GNSS卫星定位系统、惯性导航系统、360度全景相机以及控制模块、时间同步模块等高度集成,融合多种定位模式,方便快捷的安装于汽车和飞机等移动载体上,快速获取高精度多元数据。通过配套软件进行数据处理和加工,获取4D数据成果以及三维模型。可广泛应用于测绘、国土、交通、电力、数字城市和互联网街景等领域。
性能特点:
高集成
激光扫描仪、惯性导航系统、全画幅相机等多部件高度集成,整机紧凑。
高精度
GNSS+INS和激光扫描技术,测量精度高。
效率高
高速运转的扫描仪以及稳定连续的定位系统,工作效率高
长测程
扫描测程可达920m
多平台
系统可实现汽车、舶船、飞机等多平台搭载。
易操作
灵活快速拆装,操作简便
高智能
后处理软件,点云数据和影像数据无缝对接,多类型成果输出
技术指标:
指标
参数
扫描测程
920m
扫描速度
55万点/秒
角度分辨率
0.001°
扫描现场角
0°~330°
测量精度
±20mm
影像分辨率
3000万像素
作业速度
≤50Km/h
功耗
85V
尺寸
515*248*310(mm)
重量
17.39kg
电压
12v~36V
系统硬件
部分
标配
选配
pos系统
√
激光扫描仪GNSS卫星定位系统
√
控制与存储系统
√
全景相机(车载配置)
√
单反相机(机载配置)
√
系统软件:
软件名称
主要功能
征图操控软件
CLMS-01小型激光测量设备实时显控程序,用于小型车载和机载激光测量设备的控制和实时轨迹监测。其主要功能有:开启和关闭扫描仪,开启相机、惯导、GNSS,导入航线文件,实时显示设备状态、行进轨迹、扫描点云、拍摄影像,下载惯导、GNSS、扫描仪数据等等
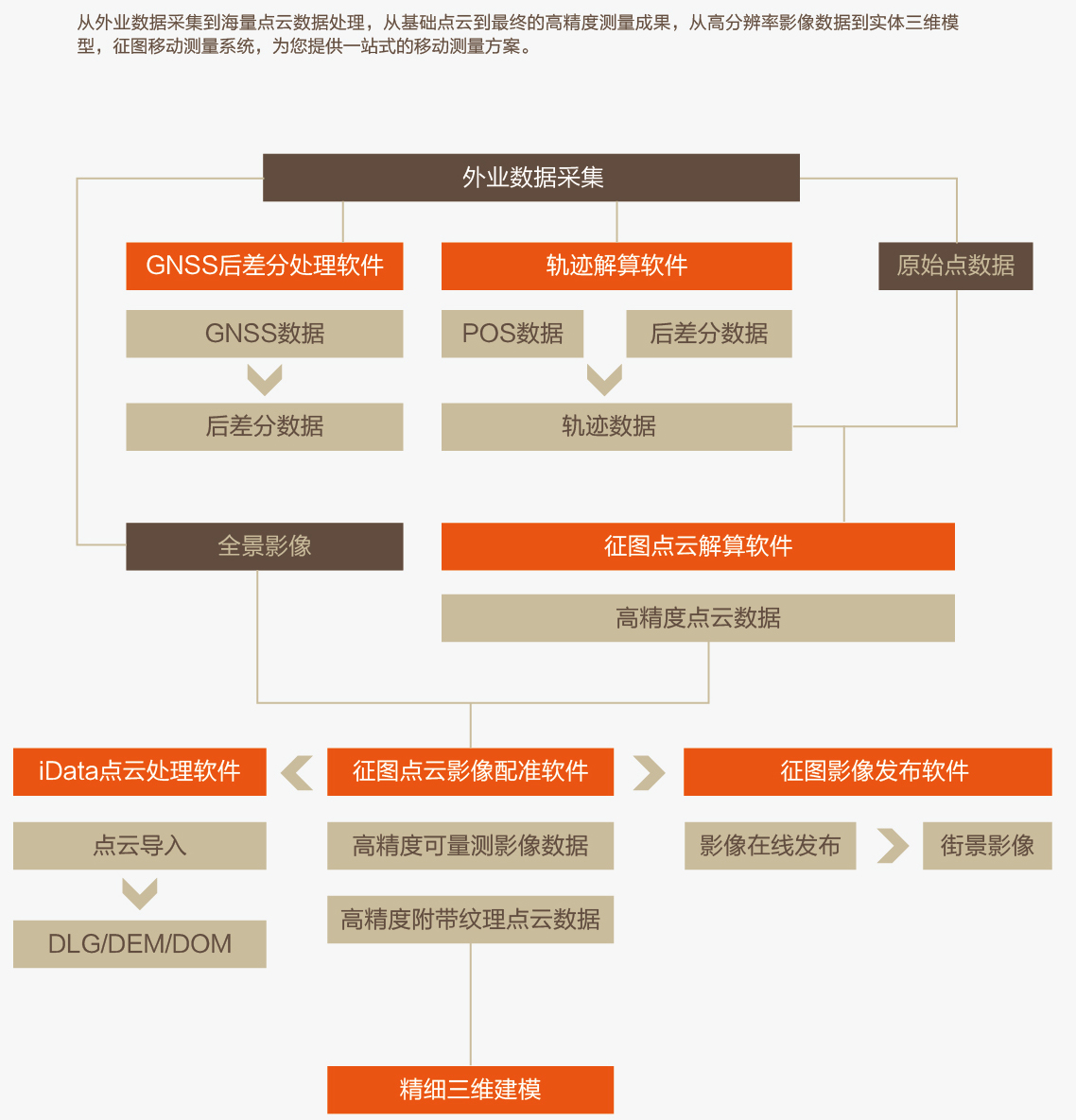
GNSS后差分处理软件
对基准站数据进行提取及格式转换
轨迹结算软件
融合GNSS后差分数据与IMU数据,获得高精度坐标与姿态(POS)信息
征图点云解算软件
进行基准站、移动站数据的格式转化,惯导数据的格式转化,提供由激光扫描仪导出的点云数据处理结果,可导出.las,.xyz,.view,等格式的点云数据
征图影像点云配准软件
PointProcess
主要用于读写、显示和浏览激光点云及全景影像,并进行点云数据与全景影像的空间配准,同时可以完成对空间点、线、面要素的测量和保存。
征图影像网上发布软件
CloudPoints
通过建立全景,实现全景网络发布,360°自由旋转浏览、加载显示热点信息、单像测量、跳转等功能
整体解决方案:

扫描仪
POS系统
全景相机



角度分辨率:0.001°
发射频率:500kHz
测距精度:优于5mm
扫描速率:200线/秒,无穷次回波
信号数字化:每个回波具有16位分辨率强度信息
扫描视场角:0°~330°测量可操作飞行高度350m,有效距离920m
激光器类型:脉冲式
激光等级:一激光
防护等级:IP64防尘,防水飞溅
存储温度:-20℃~+50℃
作业温度:0℃~+45℃
输入电压:11V~32V
功率:50W
惯导零漂:0.05°/h
差分后姿态精度:0.002°
差分后航向精度:0.005°
数据存储空间:8~32G
工作温度范围:-40°~+60°
体积:150*150*150(mm)
重量:4.5Kg
功耗:15W(24v直流供电)
外部电源:21V~32V直流供电
成像模块:6台500万像素高清CCD及低畸变镜头
采集控制模块:多相机同步软件、图像拼接软件
像元大小(um):3.45*3.45
芯片:Sony IC×655 CCD,2/3″
分辨率:单CCD2448*2048
全景:8000*4000
帧速:JPEG压缩,10FPS;无压缩:5FPS
数据接口:USB3.0
数据输出:12-bit raw 格式原始彩色图像
快门形式:全局快门
镜头:4.4mm定焦,覆盖率90%
GPIO:12-pin GPIO,可用于外触发、外部电源等。
尺寸:160*139(mm)
外壳:铝合金,防水防震
功耗:13W,12V
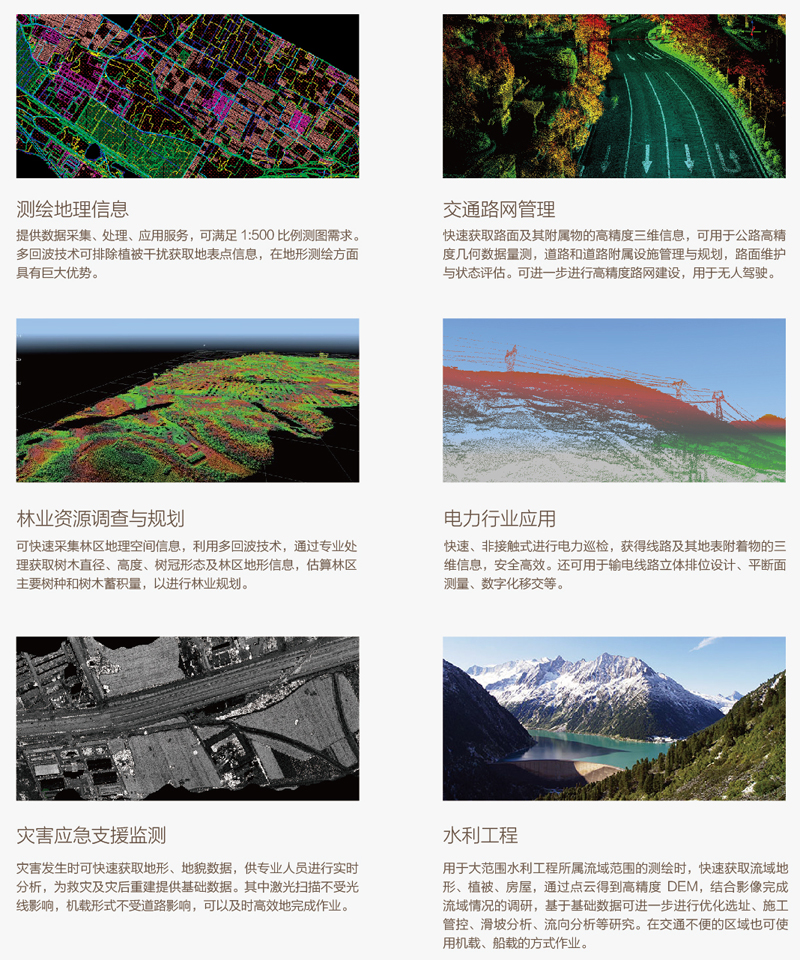
行业应用: